Ein Baubericht von Guido Faust


Der Bausatz DELPHIN von Norbert Brüggen kommt in einem Karton mit allen 3D Druckteilen, Polystyrolteilen und einigen Kleinteilen. Alle Dichtungen sind enthalten. Die Anleitung führt von Doppelseite über Doppelseite durch die Bauabschnitte bis zum fertigen Modell. Ein paar wenige Kenntnisse, wie z.B. der Umgang mit einem Lötkolben sind jedoch erforderlich (können aber teilweise vereinfacht werden, wie später noch beschrieben wird).
Motor, Servos, Lageregler und Empfänger können direkt mit dazu geordert werden. Das ist zu empfehlen, da das Modell teilweise genau an die Komponenten angepasst ist.
Sekundenkleber 2 Komponenten Kleber und PVC Kleber sind im Bausatz nicht enthalten und müssen zusätzlich besorgt werden. Eine Lackierung ist nicht unbedingt erforderlich. Teile der Kuppel wurden direkt gelb eingefärbt gedruckt und die Hülle kommt bei der ASA Variante in einer weißen Farbe daher. Wer das Modell originalgetreu im grau oder in einem fantasievollem gelb sehen möchte, kommt um 1K Sprüh-Füller und entsprechende Sprühfarben nicht drum herum.
Bei der Elektronik sind noch ein paar Komponenten notwendig, wie BEC, Akkus und eine Unterspannungserkennung, die auch nicht im Bausatz enthalten sind. Letzte ist zu empfehlen, aber nicht zwingend notwendig.


Zuerst müssen die Bauteile von Ihrer Stützstruktur befreit werden.


Die gedruckten Hüllteile müssen noch mit Flut- und Entlüftungslöchern versehen werden.



Die Polystyrol Teile des Verschlussrings sollten sorgfältig mit einer Laubsäge oder einer Trennscheibe ausgetrennt werden. Eine Feile glättet hervorragend die Verbindungspunkte.
Es empfiehlt sich die Teile des Verschlussrings zu markieren, damit beim Verkleben keine Fehler passieren. Zusätzlich ist es vom Vorteil alle Löcher und Gewinde vor dem Verkleben bereits reinzuschneiden.


Nach dem Verkleben der Verschlussringspannten muss zwingend überschüssiger Kleber im Bereich des Motors, des Simmerrings und der O-Ring Dichtung weggewischt werden.

Das Technikgerüst kann mit Sekundenkleber Loctite 406 sehr zuverlässig verklebt werden. Es ist robust und stabilisiert mit seinen Spannten das Druckkörperrohr.

Dieses sollte an der saubersten Seite mit einem Cuttermesser eine Fase bekommen. Hierbei darf man die Rohrinnenseite nicht mit Kratzern beschädigen. Die schräge Fase erleichtert später der O-Ring-Dichtung sich beim Verschließen des Modells in das Rohr zu drücken.
Jetzt kann der Simmering mit Gelsekundenkleber eingesetzt werden. Dieser wird am besten mit einem flachen Gegenstand plan eingedrückt.
Die Schrauben des Motors können unterhalb der Schraubenköpfe ebenfalls mit Gel-Sekundenkleber benetzt und in einem Zug zusammen mit dem Motor montiert werden. Hierbei vorher die Motorwelle im Bereich des Simmerrings gut einfetten.


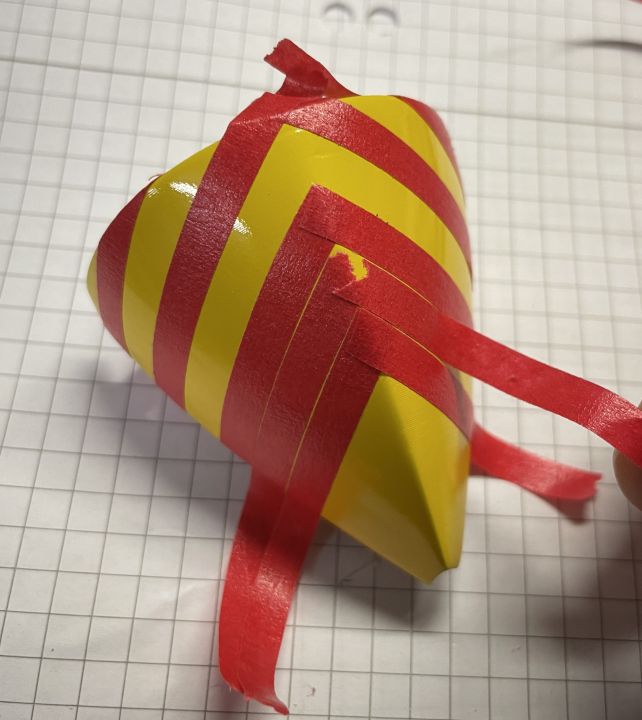
Für die Messingrohre des optionalen Drucksensoranschlusses und für die optionale Erkennungslampe im Heckteil eignet sich 2Komponentenkleber zur Befestigung. Auch die Gestänge Durchführungen können mit demselben Kleber verklebt werden. Sie sind bereits mit etwas Fett versehen.

Nachdem das Technikgerüst mit seinem Verschlussring fertiggestellt ist, kann man sich um das Bugteil mit seinem Druckkörper kümmern. Zuerst müssen die zwei Bleiplatten in das Druckteil eingeklebt werden. Ich habe in der Länge 5mm Streifen von den Bleiplatten abgeschnitten. Das erleichtert später das Einsetzen des Druckkörpers. Zusätzlich hat man vom Gesamtgewicht etwas mehr Spielraum bei der Ausstattung des Bootes
Von den 5mm Streifen können 7 Gramm in eine Bohrung unter der Gumminase im Bugteil eingeklebt werden. So lässt sich das Modell später einfacher trimmen. Die Bleiplatten müssen knitterfrei mit einem flexibel aushärtenden Kleber (Sika Flex) in das Mittelteil eingeklebt werden. Zwischen Bleiplatten und Druckkörperrohr ist später kein Platz mehr.

Vor dem Verkleben des Druckkörpers mit Mittelteil und Bugteil sollte bereits der Polystyrol-Druckkörperboden in das Rohr mit PVC Kleber eingeklebt und eine Dichtigkeitsprüfung gemacht sein. Hier reicht es schon aus, das Rohr gefüllt, mit Wasser und etwas Spüli, eine Nacht stehen zu lassen. Wenn man am nächsten Morgen keine Pfütze sieht hat man gute Arbeit geleistet.
Nachdem der Hüllkörper des Ubootes soweit fertig ist kann man die komplette Oberfläche mit 300er Schleifpapier etwas glätten. Die Oberfläche muss nicht perfekt glatt sein, eine angeraute Hülle reicht erstmal völlig aus. Auch Spachtelarbeiten können in dieser Phase noch sehr einfach erledigt werden.

Das Anlöten der Scharniere an die Ruderflächen ist mit Sicherheit das Schwierigste an dem Bausatz.
Die Scharnierrohre müssen an die Ruderflächen samt Ruderhebel angelötet und anschließend aufgetrennt werden. Das Fixieren der Ruderflächen mit Klebeband erleichtert die Lötarbeiten erheblich.



Sollte das Verlöten zu schwierig sein gibt, es auf Anfrage bei tauchrobotershop.de ein 1b-Heck als alternative Lösung.
Das optionale Heckteil kommt mit komplett gedruckten Rudern. Es ist eine Mischung aus DELPIN I und DELPHIN II. Die Anordnung der Tiefenruder ist mittig wie beim DELPHIN I. Das Seitenruder sitzt aber hinter dem Propeller wie beim DELPHIN II. Zusätzlich ist das optionale Heck mit neutral profilierten Rudern ausgestattet, die nur noch mit Edelstahlstäben eingehängt werden müssen.


Sollte man die Ruderflächen doch erfolgreich verlötet und verklebt haben kann das Modell für die Lackierung vorbereitet werden.
Es empfiehlt sich vor allen Füller- und Lackschichten einen sprühbaren PVC Primer als Haftvermittler aufzutragen. Das verhindert später plötzliche Lackabplatzungen.
Nach dem Primer reichen 6 Schichten 1K Füller aus um die Druckriefen auszufüllen. Nach einem Nassschleifgang mit 380er Schleifpapier ist der Rumpf komplett glatt, die Details sind aber noch vorhanden.



Nach den Lackierarbeiten kann das Heckteil Komplett zusammengesetzt werden. Die Edelstahlstäbe der Ruderscharniere lassen sich mit gut mit einem Tröpfchen Schraubensicherung mittelfest fixieren.

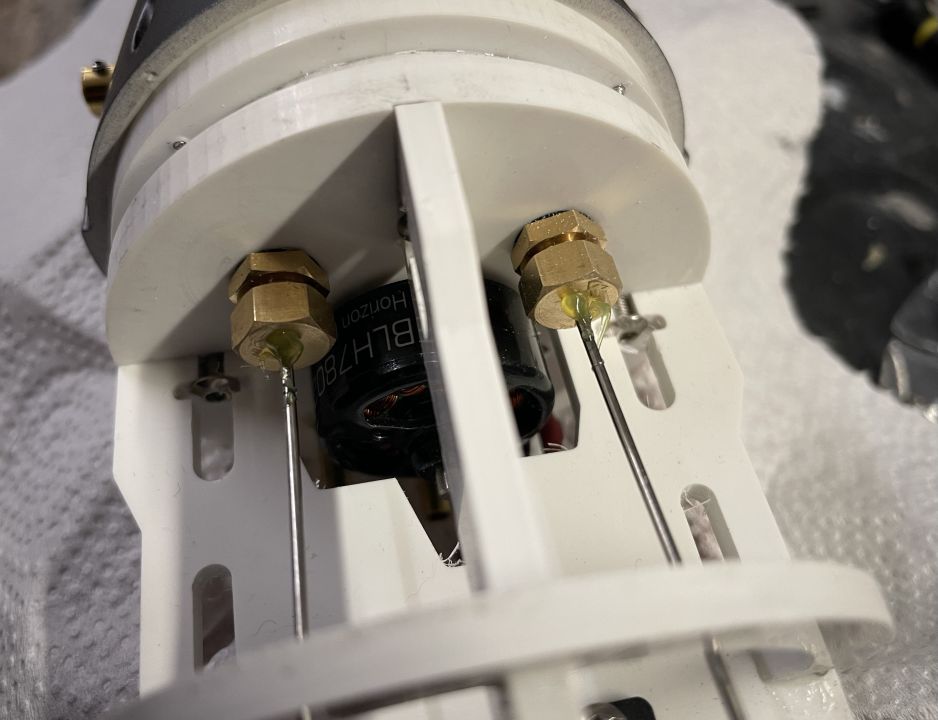
Für die Gestänge der Tiefenruder müssen Z förmige Endbeschläge gebogen werden. Für solche Biegungen gibt es Z-Beschlag Krimpzangen, die die Arbeit vereinfachen. Ein vorheriges markieren der Biegestellen ist hier sinnvoll.




Bevor die Servos eingebaut werden, sollten sie mit der Fernsteuerungsanlage auf Neutralstellung einstellen.
Die Gestänge liegen mit ein wenig Spannung auf den Ruderholmen auf. Diese Spannung verhindert das rausrutschen der Schraubösen aus den Ruderholmen. Die Zweckentfremdung zweier Kabelklemmen stellen diese Schraubösen in einer hervorragend kompakten Ausführung da. Wem die reine Steckung zu unsicher ist kann unter die Kabelklemmen ein Lötpad einer Lochrasterplatine verlöten um die Schrauböse fest aber beweglich mit dem Ruderholm zu verbinden.

Die Gestänge sollten vor dem Zusammenbau im Bereich der Dichtungen nochmals gut mit Fett verstehen werden.
Wer keinen passenden Torx Schraubendreher besitzt um den Heckkegel auf den Verschlussring zu schrauben kann hier auch M2 Zylinderkopfschrauben nutzen.

Bei der Befestigung des Technikgerüst mit dem Verschlussring sind M3 Linsenkopfschrauben mit Innensechskant die deutlich bessere Wahl als die drei Kreuzschrauben im Bausatz. Mit einem Kugelkopf Sechskantschlüssel können diese Schrauben deutlich einfacher angezogen werden.

Der Heckkegel ist somit final zusammengebaut und das Bugteil kann fertiggestellt werden. Zuerst sollte die Kuppel mit einem flexibel aushärtenden Kleber wie Sikaflex verklebt werden. Seitlich heraustretender Kleber kann problemlos ohne Gematsche nach der Aushärtung entfernt werden. Ich habe mich entschieden hinter dem Fahrer ein 2mm Loch in den Druckkörper zu bohren um die Kuppel atmosphärisch mit dem Druckkörper zu verbinden.


Wenn jetzt die O-Ring Dichtung auf den Verschlussring aufgezogen und mit einem Fettfilm versehen ist, kann eine Dichtigkeitsprobe durchgeführt werden. Alle Druckkörperdurchführungen müssen hierfür verschlossen sein. Wird das Boot zusammengesteckt und verschlossen, bildet dich automatisch ein Überdruck im Boot. Wenn es unter Wasser gehalten wird sollten keine Luftblasen aufsteigen. Beim öffnen drückt der Überdruck bei gut gefetteten O-Ring das Boot von alleine auseinander. Tauchen Luftblasen auf, muss das Leck jetzt geschlossen werden. Sekundenkleber kann solche Leckagen schnell und einfach schließen. Über den Schlauchanschluss des Tiefensensors kann der DELPHIN zusätzlich zu Testzwecken aufgepustet werden.
Da der Druckkörper mittlerweile mehrfach geprüft ist, kann jetzt problemlos die Kuppelverkleidung aufgeklebt werden. Hierzu vorher den Schnorchel gerade ausrichten. Die Kuppelverkleidung muss sich an dem gerade ausgerichteten Schnorchel orientieren. Ist der Schnorchel später schief, wirkt er wie ein Querruder. Was ein negatives Fahrverhalten nach sich zieht.


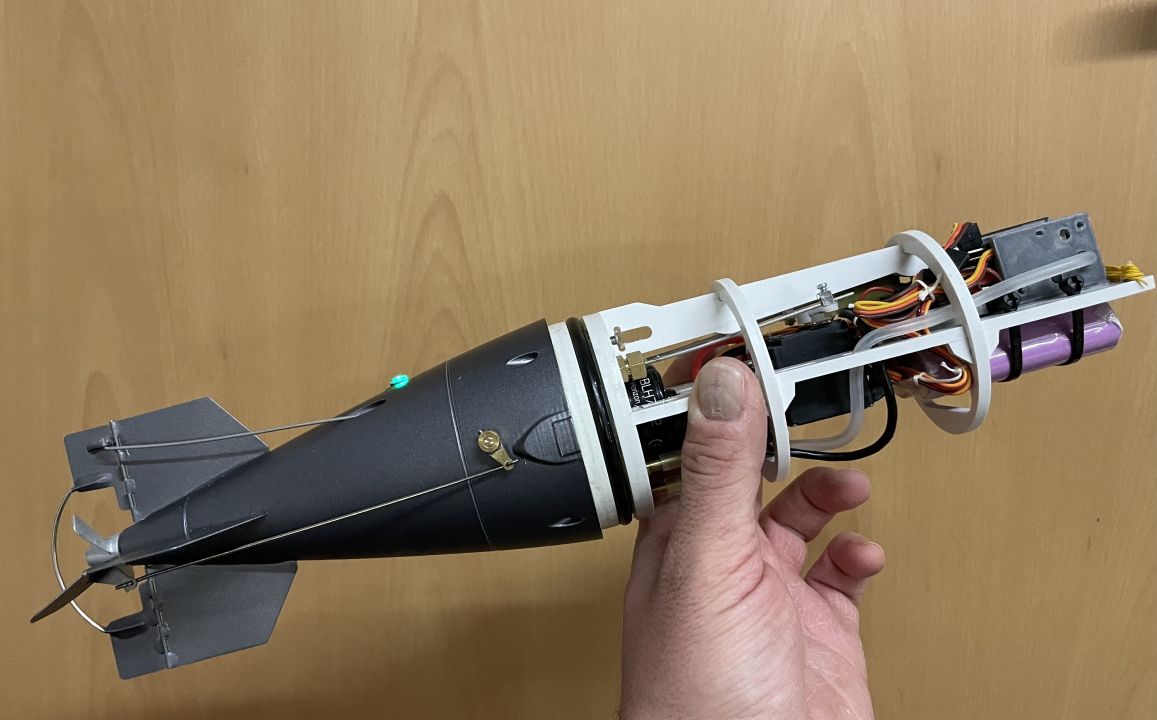
Das Modell sieht jetzt äußerlich fertig gestellt aus. Jetzt fehlen noch die Elektronik und das Setup für die erste Fahrt.
Bevor die Elektronik des DELPHIN ein Thema wird sollte man sich für ein Fernsteuerungssystem entschieden haben.
Hier bei ist zu beachten, dass hohe Frequenzen schnell im Wasser absorbiert werden. Dadurch fallen die aktuellen 2,5 GHz Anlagen alle raus. Sie reichen nur 2 cm tief ins Süßwasser. Die alten 40 MHz Funkanlagen reichen bis zu 5m tief in Süßwasser. Wobei die Reichweite stark vom Salzgehalt des Süßwassers abhängt. Schwimmbäder mit gechlortem Wasser verringern die 5m Reichweite auch enorm. Salzwasser, was eine deutlich höhere elektrische Leitfähigkeit besitzt schirmt die Funkwellen bereits nach 1,5m Tiefe ab.
35MHz Anlagen funktionieren technisch genau so gut wie die 40 MHz Sender. Sie sind jedoch nur für Flugzeuge erlaubt und dürfen aus Sicherheitsgründen nicht für Autos und Boote genutzt werden.
Es gibt mittlerweile 900 MHz Sendermodule und Empfänger. Diese kommen aus dem Flugbereich und werden hier als Backup Sendesystem genutzt. Die Frequenz ist aber nicht wie die 35MHz an den Flugmodellbau gebunden und kann frei verwendet werden. In Ubooten hat man mit den 900MHz eine Reichweite bis c.a. 1,5m Tiefe. Somit sind diese noch sehr neuen Sender für die Zukunft der Modell-U-Boote sehr interessant.
Analoge 40MHz Sender können mit etwas Glück auf Online-Auktionsplattformen im guten Zustand für 20€ ersteigert werden. Hier sollte man aber darauf achten, dass man sich für ein Frequenzmodulations-System (FM) entscheidet. Bei diesen alten Anlagen war die Amplitudenmodulation (AM) noch weit verbreitet. Der aktuell verfügbare Corona RP8D1 Empfänger unterstützt nur das FM-System.
Digitale 40MHz Sender wie die Graupner MC14, MC15, MC16, MC19, MC20, MC22 oder MC24 werden für höhere Beträge versteigert und können bei sehr guter Qualität schnell bis zu 300€ erreichen.
Bei den meisten älteren Graupner Sendern ist eine Diode auf der Platine defekt. Diese Diode soll den Akku vor verpolt angeschlossen Ladegeräten schützen. Meistens ist im Leben der Fernsteuerung ein gravierender Fehler passiert: Man hat das Ladekabel zuerst in die Fernsteuerung gesteckt und wollte es erst danach ins Ladegerät einstecken. Hierbei haben sich die Bananen-Stecker des Ladekabels berührt. Es kam zu einem Kurzschluss und die Diode auf der Platine hat sich geopfert, indem sie durchbrannte. Diese Fernsteuerungen lassen sich dann nicht mehr laden.
Man kann der Diode den Schaden optisch nicht ansehen. Ich habe in einem Bild die Schutzdiode einer Graupner FM314 gezeigt.


Diese defekte Diode konnte auf der Rückseite über eine Lötbrücke gebrückt werden. Ein Auslöten und ersetzen der Diode wäre natürlich die vernünftigere Variante um den Schutz in Zukunft weiter zu gewährleisten.

Je nach Zustand kann ein wenig Kontaktspray auf der Ladebuchse und dem Ein- und Ausschalter bei diesen alten Sendern nicht schaden.
Für den DELPHIN des Bauberichtes wurde genau so ein alter analoger Graupner 40MHz FM314 Sender verwendet. Dieser Sender lässt sich auf maximal 7 Kanäle ausbauen. Wobei für den DELPHIN nur 3 Kanäle genutzt werden.
Der dynamisch tauchende Delphin wird grundlegend mit einem BEC für die 5V Spannungsversorgung, einem Fahrtregler, zwei Servos und einem Lageregler (LR3 von Modellubootschop.de) ausgestattet.
Wichtig ist noch, dass bei Verwendung eines externen BEC der rote Draht mit den 5V aus dem Empfängerstecker des Fahrtreglers entfernt und Isoliert wird. Sonst gibt es Probleme mit dem internen BEC des Fahrtreglers. Ein externes BEC mit min 2A Belastbarkeit ist zu empfehlen, da die interne Versorgung der Fahrtregler meistens nur kurzzeitig höhere Strome bereitstellen können. Da bei einem U-Boot mit Lageregler die Tiefenruderservos nie richtig still stehen, besteht hier ständig eine hohe Grundlast. Beim Fahren wird der BEC des Fahrtreglers überlastet und das Boot ist für einige Sekunden wie ausgeschaltet. Ein gut dimensioniertes externes BEC verhindert diese unangenehmen Aussetzer.
Der DELPHIN wird von zwei Li Ionen Zellen mit Spannung versorgt.
Diese Zellen können Schaden nehmen wenn Ihre Spannung einen Minimalpegel unterschreitet. Um das zu verhindern lohnt sich der Einbau einer Elektronik, die vor der Unterspannungsgrenze in die Tiefenruder eingreift und sie auf Auftauchen stellt. Die leeren Akkus fallen so auf und man hat noch genug Zeit um das Uboot „nach Hause“ zu fahren.
Auf der Internetseite der Modellubootfreunde Köln befindet sich eine Bauanleitung für solch eine Schaltung, die ohne programmierbare Bauteile auskommt. https://modellubootfreundekoeln.wordpress.com/technikecke/

Sie basiert auf einen OP-Verstärker der bei Unterspannung ein Relais schaltet. So werden die Befehle des Empfängers abgeschaltet und ein Servotester mit Auftauchbefehl fest auf die Tiefenruder aufgeschaltet. Die Platine wird zwischen Empfänger und Legeregler gesteckt.



Das Modell wird zu Einstellzwecken über ein Labornetzteil betrieben und die Unterspannungsgrenze von 5,6V eingestellt. Mit dem Spindelpoti kann jetzt genau die Schaltschwelle eingestellt werden wo bei 5,6V Bootsspannung vom Empfänger auf dem Servotester gewechselt wird. Sobald der Servotester sicher eingreift kann dieser auf den gewünschten Auftauchbefehl eingestellt werden.
Die Sicherungselektronik ist jetzt fertig eingerichtet.

Wichtig wäre noch, dass die Platine speziell für zwei Li Ion Zellen entwickelt wurde!
Li Po Zellen oder Li Fe Zellen haben andere Entladespannungen. Die Schaltung kann auch nicht automatisch mehrere oder weniger Zellen erkennen um sich darauf einzustellen.
Wer diese Unterspannungsplatine nicht herstellen möchte kann auch Fahrtregler mit einer programmierbaren Unterspannungserkennung nutzen.
Der Brushless Regler „PULSAR A-30 4D“ mit seiner zusätzlichen Programmierkarte „XQ Card“ von Pichler erfüllt diese Anforderungen. Bei Unterspannung sorgt er für einen zeitweise abgeschalteten Antriebsmotor. Diese zeitlich begrenzte Manovierunfähigkeit sollte man berücksichtigen.
Die zweite Sicherheit die ein Modell-U-Boot zwingend besitzen muss ist eine sogenannte Failsafe. Das bedeutet, dass das U-Boot bei Abriss des Funkkontaktes sofort auftauchen soll. Da der DELPHIN rein dynamisch taucht, nutzt er seine Geschwindigkeit um mit den Rudern Unterwasser zu bleiben. Kommt es zu einem Funkkontaktabriss weil er z.B. zu tiefer als 4 Meter getaucht ist sollte er automatisch wieder auftauchen. Hierzu muss nur der Motor gestoppt und die Tiefenruder auf auftauchen gestellt werden.
Der Corona RP8D1 Empfänger besitzt eine bereits eingebaute Failsafe. Diese muss jedoch vorher aktiviert werden. Bei der Aktivierung werden die aktuell anliegenden Befehle der Fernsteuerung abgespeichert und für jeden kommenden Failsafe-Fall zur Verfügung gestellt.
Da sich der DELPHIN gerne zügig Unterwasser bewegt benötigt er zwingend einen Lageregler, der die Nickachse automatisch stabilisiert.
Die Firma Tauchrobotershop.de (alt: Modelluboot.de) war ein Pionier in der Regeltechnik für Modell-U-Boote. Kenner erinnern sich noch an die sogenannte Lageregel-Briefmarke. Ein Lageregler der bereits 1998 die Größe einer Briefmarke hatte. Die Erfahrungen und Weiterentwicklungen ergeben heute noch kleinere Elektronikbauteile, die das Modell sehr zuverlässig korrigieren.
Als Setup für die erste Fahrt empfiehlt es sich den Lageregler LR3 bis zu 2 Grad über die Mittelposition aufzudrehen.
Zusätzlich sollten die Tiefenruder mit den seitlichen Messing Ruderhörnern etwas gegeneinander verdreht voreingestellt werden. Dadurch wird das Schraubendrehmonent aufgehoben.

Wer die Blink LED im Heckteil eingebaut hat kann diese mit einem Vorwiederstand direkt in einem freien Empfängersteckplatz einstecken. So kann sie zwar nicht geschaltet werden, doch sie wird automatisch beim Einschalten des Bootes mit Spannung versorgt und dient als Einschaltkontrolle.


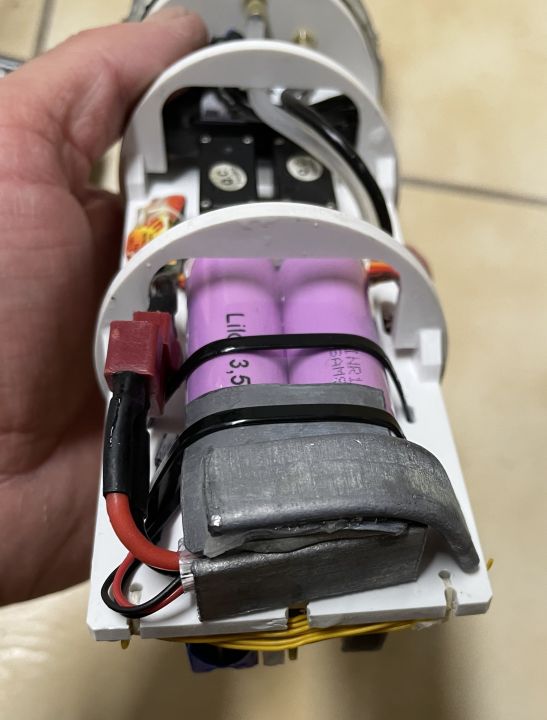
Die zwei Lithium Ionen Akku Zellen sollten mit einem Balancer Anschluss versehen werden. Ein entsprechendes Ladegerät was wiederum einen Balancer Steckplatz besitzt, kann über diesen jede einzelne Zelle überwachen und einzeln an die Spannungswerte der anderen anpassen. Es empfiehlt sich die Zellen nach der Konfektionierung mit Schrumpfschlauch zu isolieren und mit zwei Kabelbindern am Technikgerüst zu befestigen.



Der DELPHIN ist jetzt technisch bereit für seine erste Probefahrt. Das wird so aber im wahren Sinne des Wortes schief gehen. Sein Gesamtgewicht und seine Trimmung stimmen nämlich noch nicht.
Das Gesamtgewicht an Land sollte 1158 Gramm betragen. Das genaue zusätzliche Gewicht kann von Modell zu Modell unterschiedlich sein. Es ist abhängig von der Menge an Kabeln die verwendet worden sind und die Akkus können je nach Herstellercharge mehr oder weniger wiegen. Als Faustregel kann man zwei Bleiplatten mit jeweils 26 Gramm vorne mit doppelseitigem Klebeband unter die Akkus Kleben. Wenn das Boot zu hecklastig ist hilft es auch eine der Bleiplatten in Dritteln und zu einer Stange falten, das verschiebt den Schwerpunkt noch weiter nach vorne.
Mit 5 Gramm Auswuchtgewichten aus dem KFZ Bereich lassen sich später letzte Feinheiten einstellen.
Der DELPHIN sollte nicht komplett gerade im Wasser liegen. Wenn das Heck leicht tiefer im Wasser liegt zeiht der Propeller beim losfahren weniger Luft und der DELPHIN kommt besser in Fahrt. Sobald der Schnorchel aufgesteckt wird liegt das Heck nochmals deutlich tiefer im Wasser. Das ist nicht zu verhindern, da der Auftriebsschwerpunkt genau auf dem Fahrerkopf liegt. Der Schnorchel wird deutlich da hinter befestigt. Hier sieht man wie wenig Auftriebsstabilität ein U-Boot besitzt und was für Auswirkungen kleinste Gewichtsänderungen auf den Trimm des Bootes haben. Es muss ein guter Mittelweg zwischen mit und ohne Schnorchel gefunden werden.






Nachdem das alles geschafft ist kann der DELPHIN das erste Mal ins freie Wasser gesetzt werden. Nach dem Einschalten sollten alle Funktionen der Fernsteuerung kurz geprüft werden. Es empfiehlt sich erstmal ohne Schnorchel zu fahren. Der Delphin läuft sehr gutmütig und man kann ihn mit leicht nach oben gezogenen Tiefenrudern gut unter der Wasseroberfläche halten.

Rollt sich der DELPHIN in Fahrt auf die Linke Seite, so überwiegt das Propellerdehmoment. Das rechte Tiefenruder muss jetzt weiter nach oben und das linke Ruder weiter nach unten eingestellt werden.
Rollt er nach rechts überwiegt der Drehmomentausgleich der Ruder und die Korrektur hat umgekehrt stattzufinden.
Zusätzlich sollte der DELPHIN keine vertikalen Delfinbewegungen machen. Auch nicht bei voller Kraft. Kommt es zu schnellen Delfinbewegungen ist die Verstärkung des Lagereglers zu groß eingestellt und muss reduziert werden. Wenn der DELPHIN mit langsamen Ausgleichsbewegungen reagiert ist die Verstärkung des Lagereglers zu schwach eingestellt.
Jetzt kann der Schnorchel aufgesteckt werden. Bei voller Kraft und engen Kurven neigt der DELPHIN mit Schnorchel zum Rollen in die Kurveninnenseite. Es empfiehlt sich mit Schnorchel nur max 2/3 Gas zu geben.

Ist das alles geschafft, ist der DELPHIN fertig.
Als Option kann man nachträglich noch einen Tiefenregler einbauen.
Dieser wird direkt vor den Lageregler geschliffen. Der Tiefenregler von Momo Sauerland kann bei dem DELPHIN direkt auf 100% Verstärkung aufgedreht werden. Er hilft dem Modell bei schwerer See besser die Tiefe zu halten. Es gibt einen „dynamischen“ Modus wo man bei einem Tiefenruderausschlag selber die Kontrolle übernimmt. Sobald der Knüppel der Fernsteuerung wieder auf Mittelposition steht wird der aktuelle Wasserdruck gespeichert und der Tiefenregler steuert das Boot selber. So lässt sich automatisch eine Tiefe auf 10mm genau halten. Das setzt aber einen vorher gut eingestellten Lageregler voraus.
Etwas eleganter ist der Lage- und Tiefenregler 6 (kurz LTR6) von Modelluboot.de. Der Lage und Tiefenregler ist hier zusammen in einem Bauteil enthalten.
Man sollte sich für den LTR6 direkt von vorne herein entscheiden, weil er den kleinen Lageregler LR3 komplett ersetzt dessen Anschaffung im Nachhinein für das Modell überflüssig macht.


Während der ersten Fahrt merkt man, sofort nach den ersten Metern wie problemlos der DELPHIN durch das Wasser saust. Hierbei kann rasant, aber auch gemütlich gefahren werden. Das Modell gibt einem ständig ein positives beruhigendes Feedback. Der DELPHIN ist überhaupt nicht zickig und tendiert gutmütig nach oben. Gerade diese Fahreigenschaften machen den DELPHIN aus, was einen enormen Fahrspaß verspricht.
Das bedeutet natürlich auch, wer mehr möchte, die Form des tropfenförmigen U-Bootes verträgt noch deutlich höhere Geschwindigkeiten.
Bewegte Bilder sagen meist mehr aus als viele Worte: https://youtu.be/rOUGLEv1-_E
Für den Nachbau finden sich auf der Seite der Modell-U-Boot Freunde Köln weitere Informationen: https://modellubootfreundekoeln.wordpress.com/technikecke/
Man sollte sich etwas Zeit beim Bau lassen und sorgfältig arbeiten. Die Physik zeigt kein Erbarmen und das Modell muss Ihr ständig trotzen.


Allzeit „Turm raus“ und eine Hand breit Wasser unterm Kiel.
